
















EC二次開發啟動流程
2025-07-21
1. 簡介
客戶應用場景中可能會要求使用 SDK 來開發,下面介紹 SDK 啟動機器人方法,過程中請保持機器人為遠程模式(REMOTE),與示教器操作大體一致只是以代碼的形式分步執行,清除報錯,上使能,同步,編碼器校準等功能,至機器人處于可運行狀態。
以下各指令代碼可參考SDK手冊
2. 操作流程
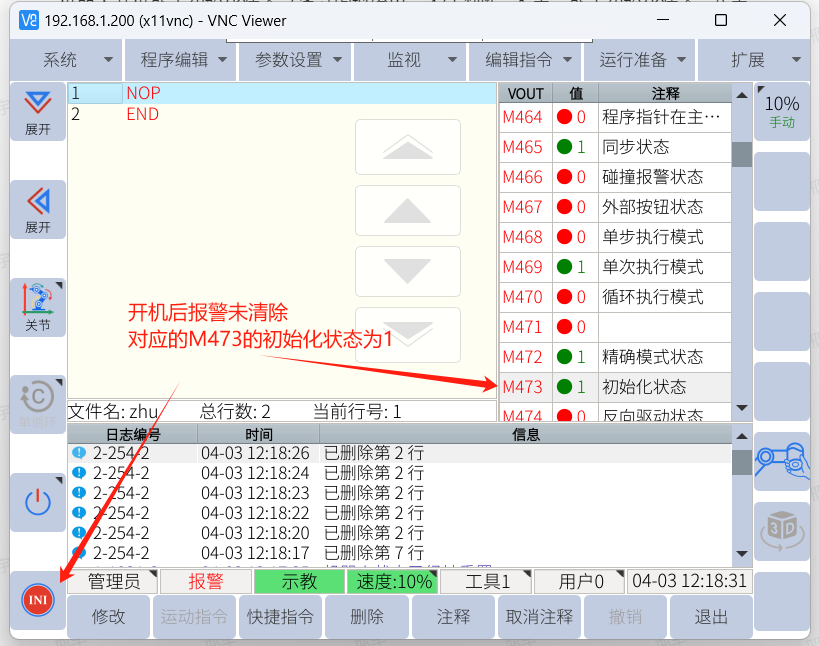
2.1 初始化狀態
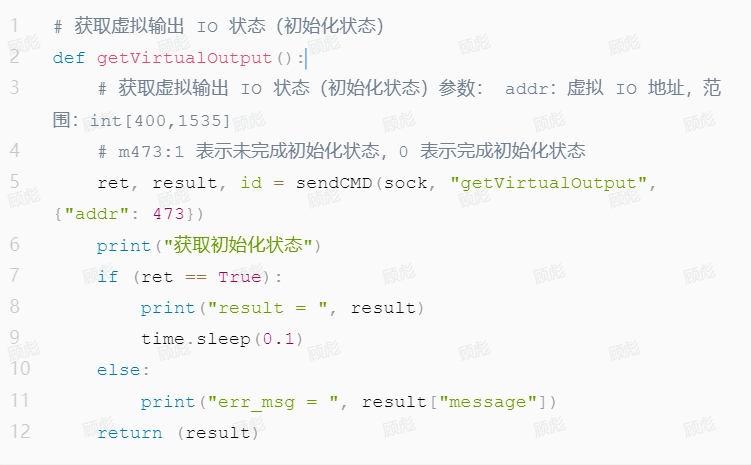
機器人開機處于初始化狀態(通過虛擬輸出 m473 判斷,1 表示未完成初始化狀態,0 表示完成初始化狀態),指令函數可使用getVirtualOutput。
獲取初始化狀態代碼示例():
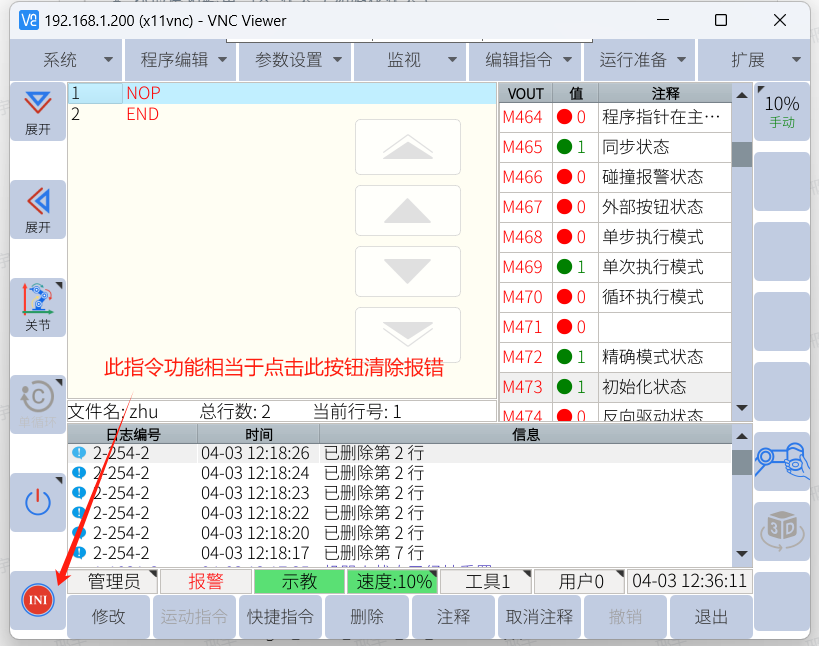
2.2 清除報錯并釋放抱閘
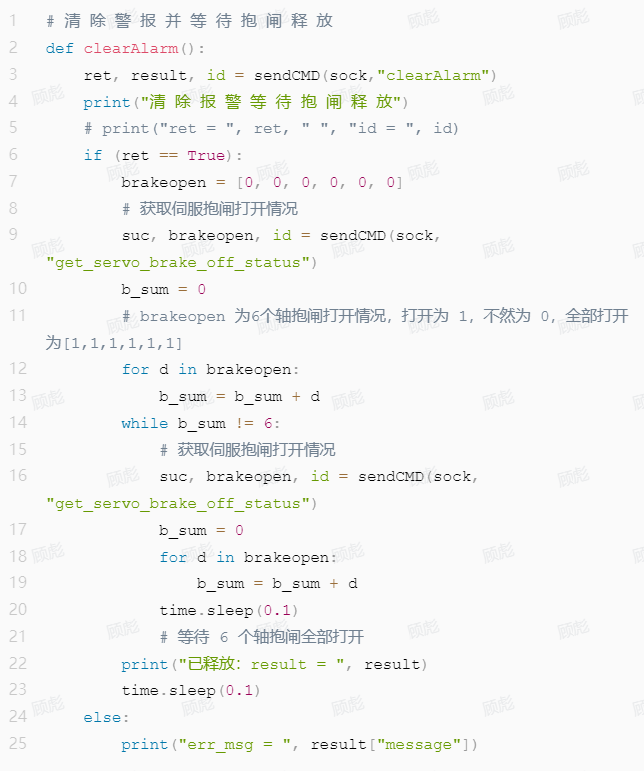
如上序初始化判斷為未初始化狀態則需要使用 clearAlarm 指令對機器人清錯和打開抱閘。機器人抱閘打開情況可以通過 get_servo_brake_off_status 函數判斷。
清除報錯并等待抱閘釋放代碼示例():
2.3 獲取同步狀態并同步
獲取機器人同步狀態 getMotorStatus,若未同步執行同步指令 syncMotorStatus。

獲取同步狀態代碼示例():

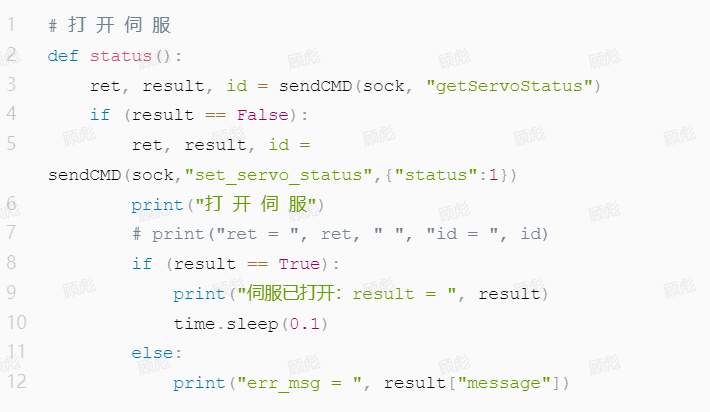
2.4 打開伺服使能
機器人使用運動功能或運動指令時需打開伺服使能,上使能后才能執行。
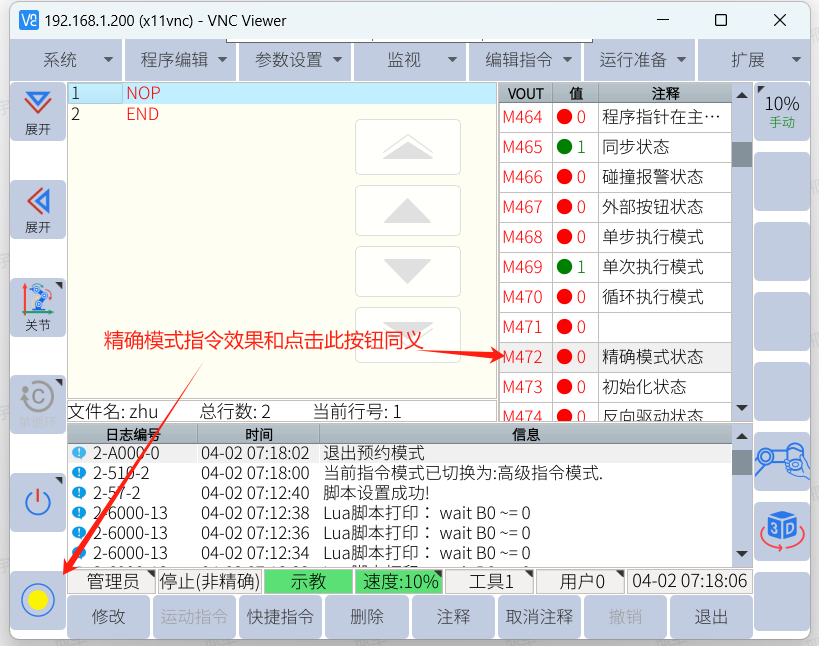
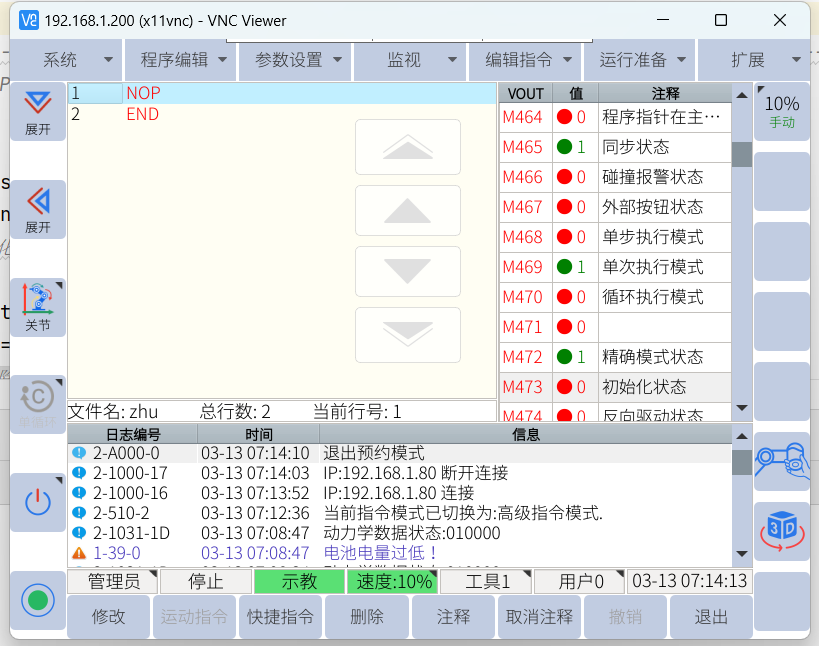
2.5 獲取機器人是否處于精確模式
判斷機器人是否處于精確模式(通過虛擬輸出 m472 判斷,0 表示未校準模式,1 表示精確模式),若未校準,執行校準操作 calibrate_encoder_zero_position,并等待機器人達到m472=1 的精確模式。
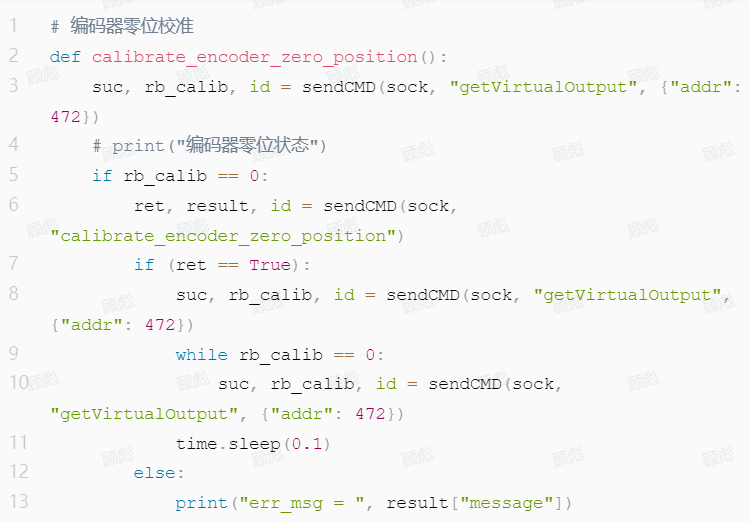
獲取機器人是否處于精確模式并執行精確模式指令示例():
# 編碼器零位校準
3. 匯總
操作流程的2.1-2.5匯總在一起就可以實現SDK一鍵啟動至可運行狀態(見下圖)。


注:所有SDK指令代碼運行時,需要機器人處于遠程模式(REMOTE)


























