
















CS機器人四點法腳本函數(shù)碼垛功能
2025-05-28
1.簡介
interpolate_pose此指令適用于有規(guī)律/等間距的矩陣 只需示教四個頂點點位即可完成矩陣取放物料,可以用于外部設備隨機發(fā)送矩陣取料/放料位置 機械手實現(xiàn)矩陣抓取
2.操作流程
(1):指令說明如圖2-1
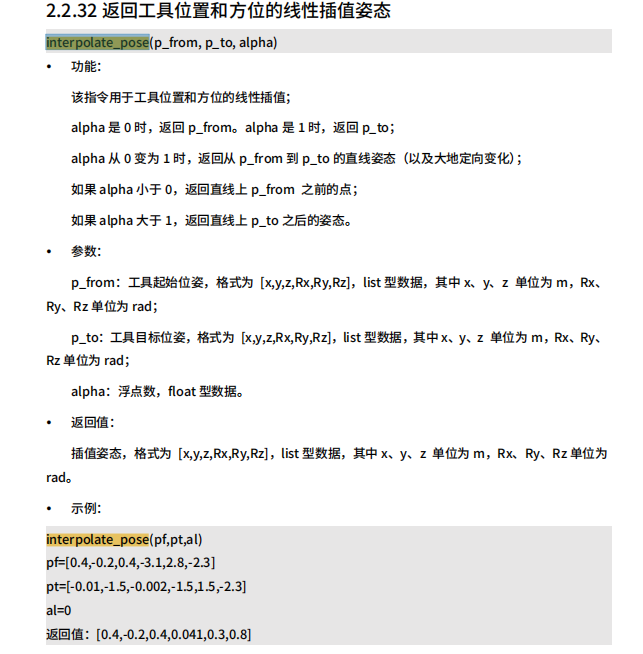
(圖2-1)
錄制_2024_07_24_00_31_06_90.mp4
(2)舉例:矩陣為3行4列(圖2-2)機械手如何走到6號位置
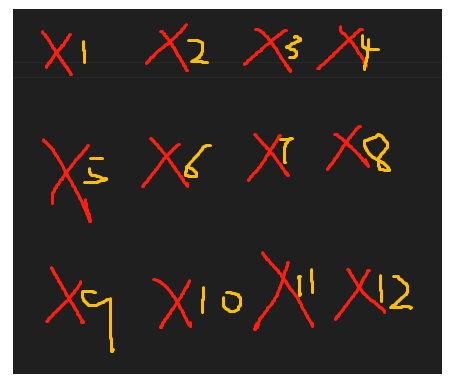
(圖2-2)
錄制_2024_07_24_00_52_19_183.mp4
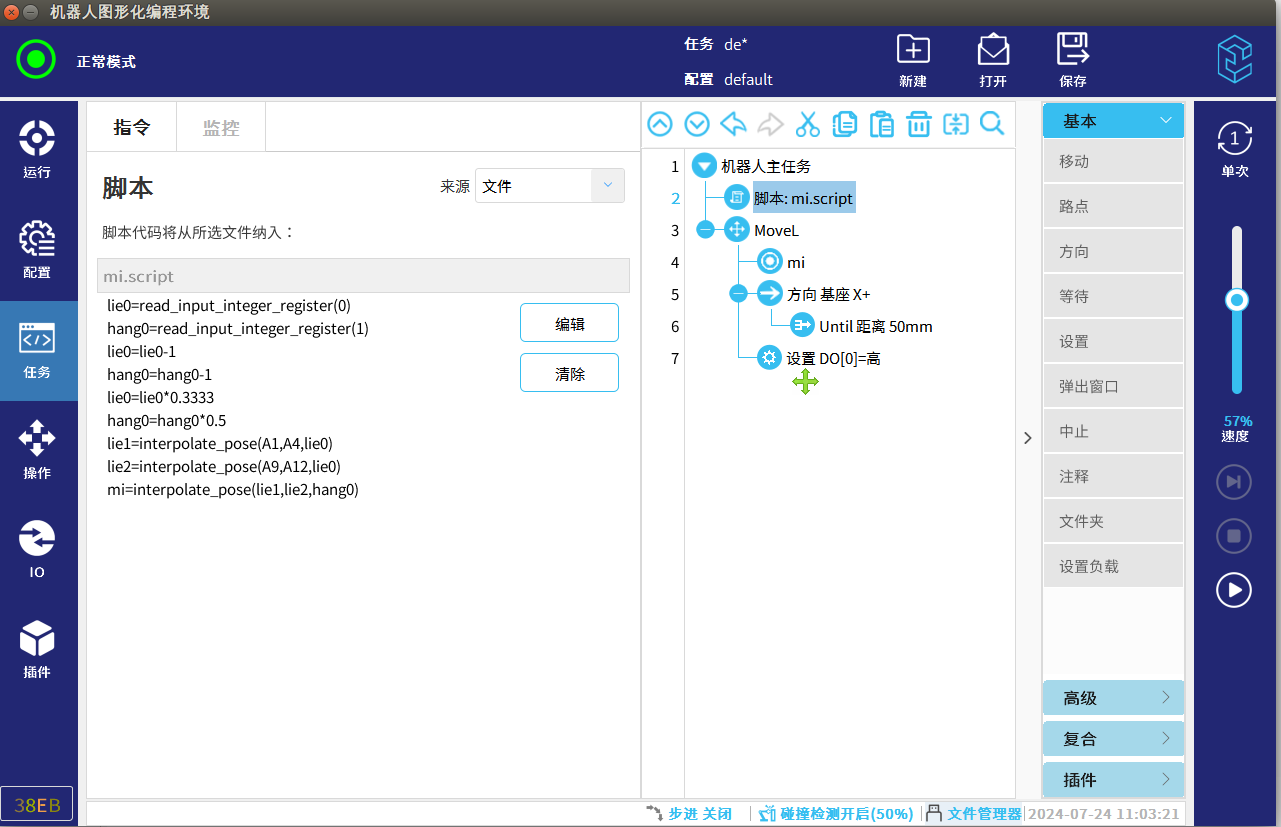
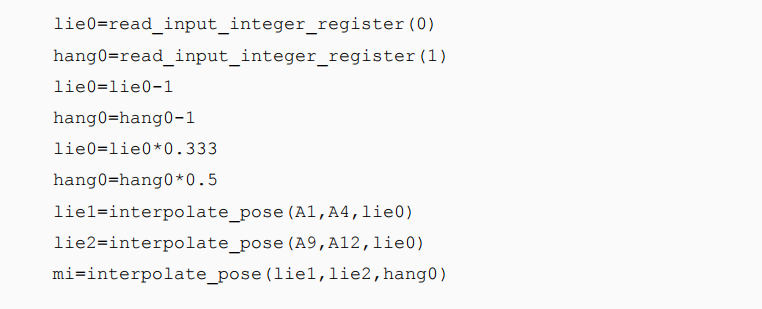
(3):舉例:矩陣為3行4列(圖2-2)外部設備(PLC)發(fā)送2行2列機械手如何走
錄制_2024_07_24_10_57_56_582.mp4
3.常見問題解答
(1)注意事項:如一列有11個點位 不是用1/11而是1/10因為第一個點是從0開始
(2)此指令只適用于等間距 有規(guī)律的矩陣
(3)本次演示使用默認大地坐標系 TCP 夾具任意姿態(tài)安裝 此指令只是用終止點——起始點除以點位間隔 無需在意末端姿態(tài)



資源中心























