CS機器人做modbus從站,配置外部啟動
2025-05-28
1.簡介
- 前期準備:1.機器手做為modbus從站并已通信上。2.已安裝I/O高級配置
2.操作流程
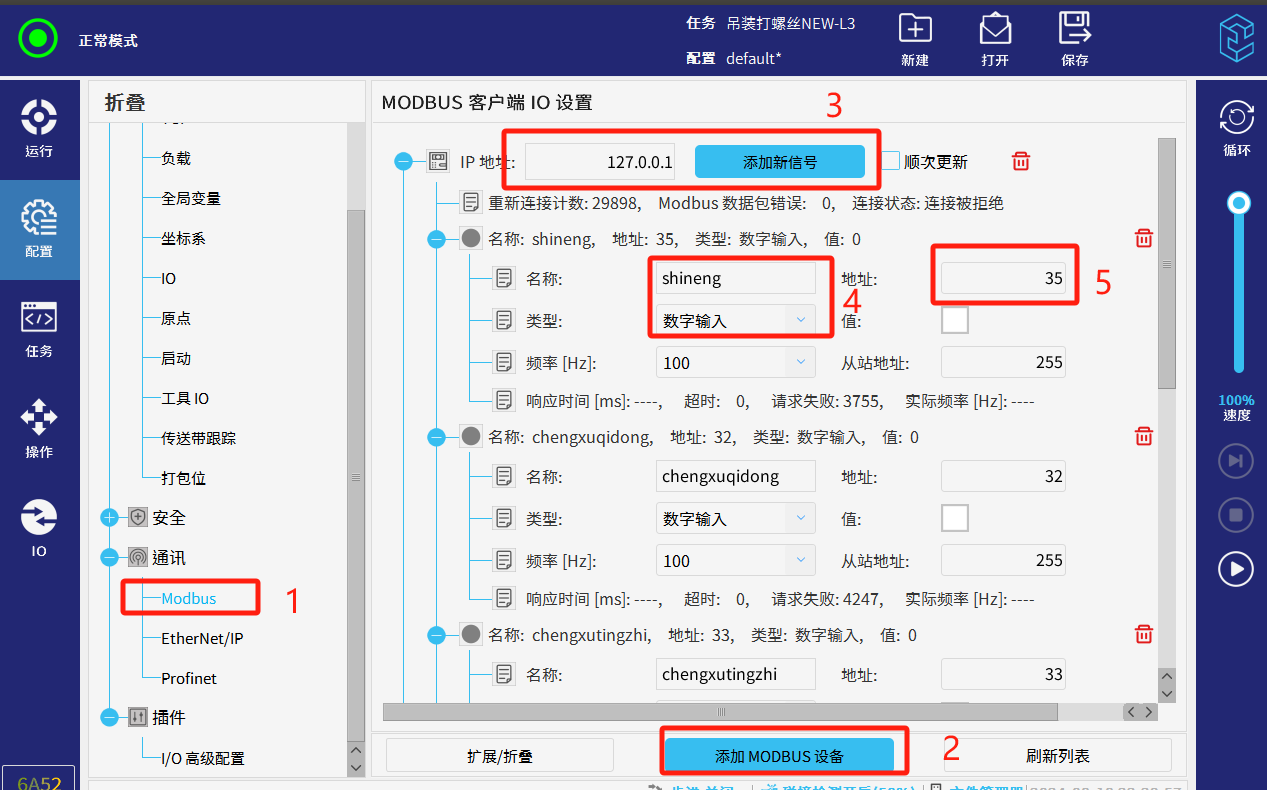
點擊機器人示教器配置--通訊--modbus--添加modbus設備,輸入ip(127.0.0.1屬于機器人內部mudbus從站內部地址)
如圖4和5處,設置每一個信號名稱、類型、地址。
完成需要用的信號設置后,切換到I/O高級配置頁面。
- 切換modbus,選擇輸入或輸出信號。
- 選擇該信號需要實現的功能(如:機器人上電、下電、釋放抱閘、任務啟動等)
- 選擇觸發模式,和使能狀態(默認為禁止,需每個手動切換到啟用)

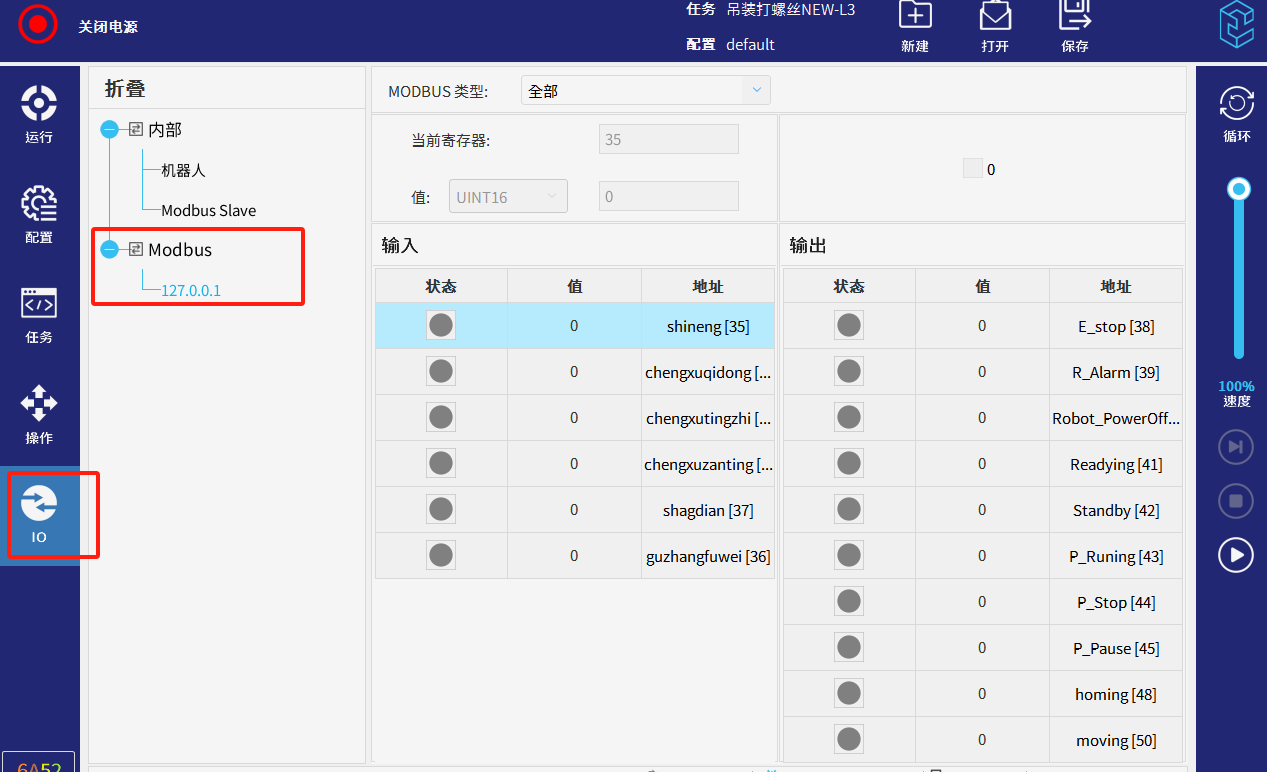
查看配置信號狀態
- 可在左側欄目IO--modbus,查看已配置好信號狀態
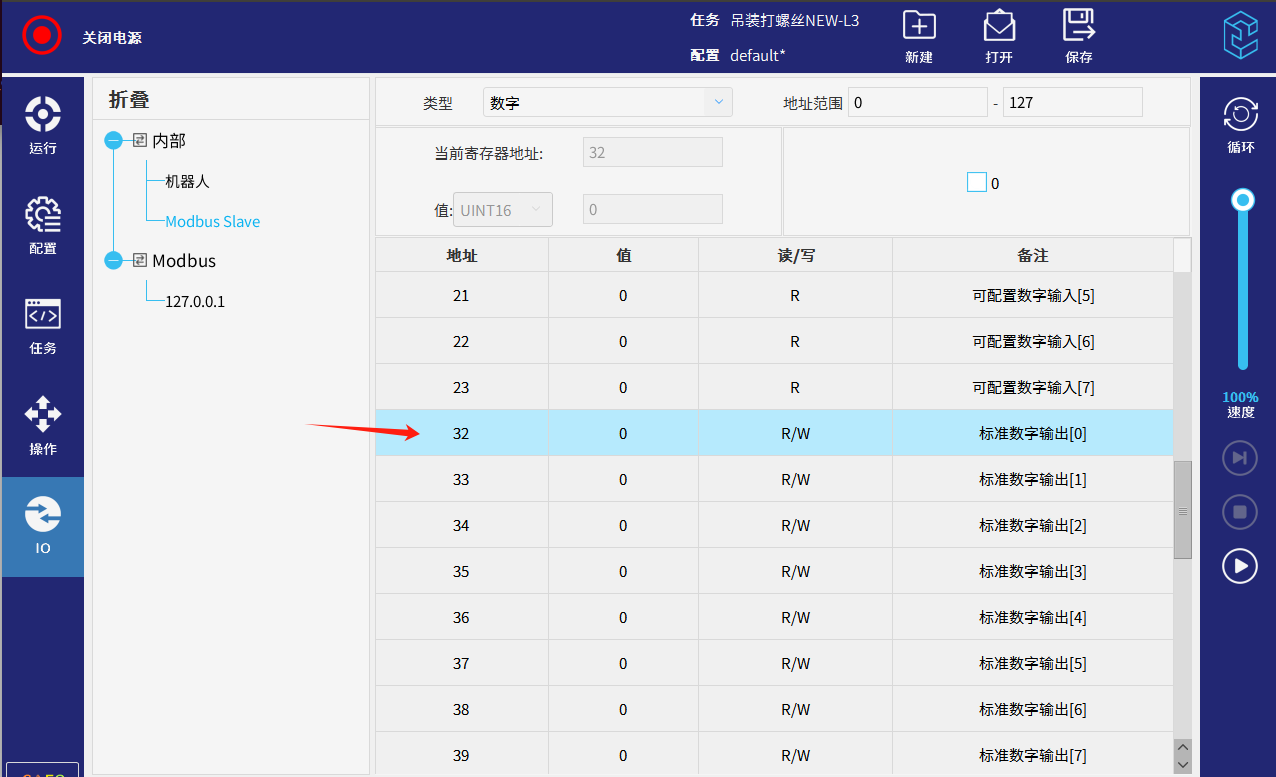
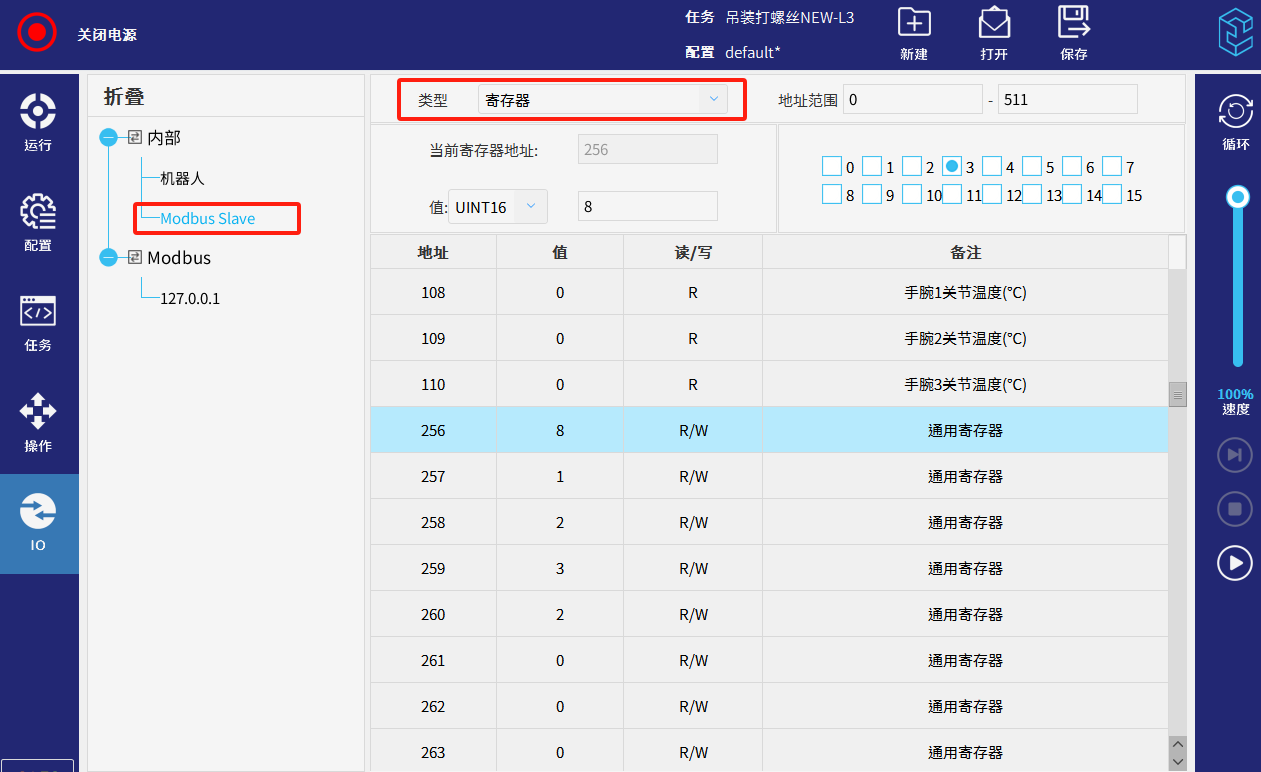
- 內部--modbus slave,可以查看狀態和控制(數字輸出32,通用寄存器256地址開始)
- 可以根據對應地址上的讀/寫權限,讀取機器人的狀態,位置信息等數據或寫入新的值
3.常見問題解答
1、I/O高級配置頁面需要信號確認名稱和類型后,才會顯示。
- 使能狀態注意切換,默認都是禁止。
- 使用內部mudbus作從站,把信號配置數字輸入信號,需要犧牲數字輸出信號作輸入。如下圖配置地址從32開始。