
















CS機器人抱閘方式
1.簡介
本篇文檔介紹當前CS系列機器人的抱閘類型、查看當前抱閘類型及松開抱閘的方法
機器人當前抱閘類型分別為電磁式、插銷式及有部分機器人抱閘方式為1-3軸電磁式,4-6軸為插銷式過渡版本;設置不正確,1、會導致關節發熱;2、時間久了會導致關節損壞;3、抱閘可能出現打不開的情況,或者碰撞的報警出現
1.1 插銷式抱閘
電磁插銷式抱閘相比電磁剎車片式抱閘有下列優點:1.軸向尺寸更緊湊;2. 電磁線圈發熱量更小,散熱效果也更好;3.成本更低。但是,電磁插銷式抱閘也 有一個缺點就是抱閘定位效果不好,機器人掉電之后關節有一個(60度/減速 比)的活動范圍;關機/急停后,會有稍許的下墜。
1.2 電磁式抱閘
電磁剎車片式抱閘優點相比插銷式,在給機器人本體斷電時不會有活動范圍,相比的缺點除了軸向尺寸不夠緊湊、電磁線圈發熱量大、成本高之外,還會產生摩擦粉塵。如果不對產生粉塵的器件很好地包裹,那么會對光電編碼器產生干擾
2.操作流程
2.1 抱閘類型查看和設置
a. 檢查方法流程
- 在正常模式下點擊下圖所示右上角紅框1標注區域(連續快速點擊 5-8 次)就會出現輸入密碼頁面界,紅框2點擊輸入密碼:elibot,進入專家模式;

點擊伺服-伺服參數,選擇對應伺服,下拉查看0x74參數,
通過伺服版本號可以初步進行伺服版本判斷,如果伺服固件版本 3 的個位是 4,則表示為電磁抱閘,為 8 則表示為彈桿抱閘,
為 0 則表示固件為通用版本,此時無法通過固件區分抱閘保本。
(比如截圖中的 90,表示固件為通用版本,如果為 98,則表示為彈桿抱閘,如果為 94,則表示為電磁抱閘)



b. 當前類型查看及修改
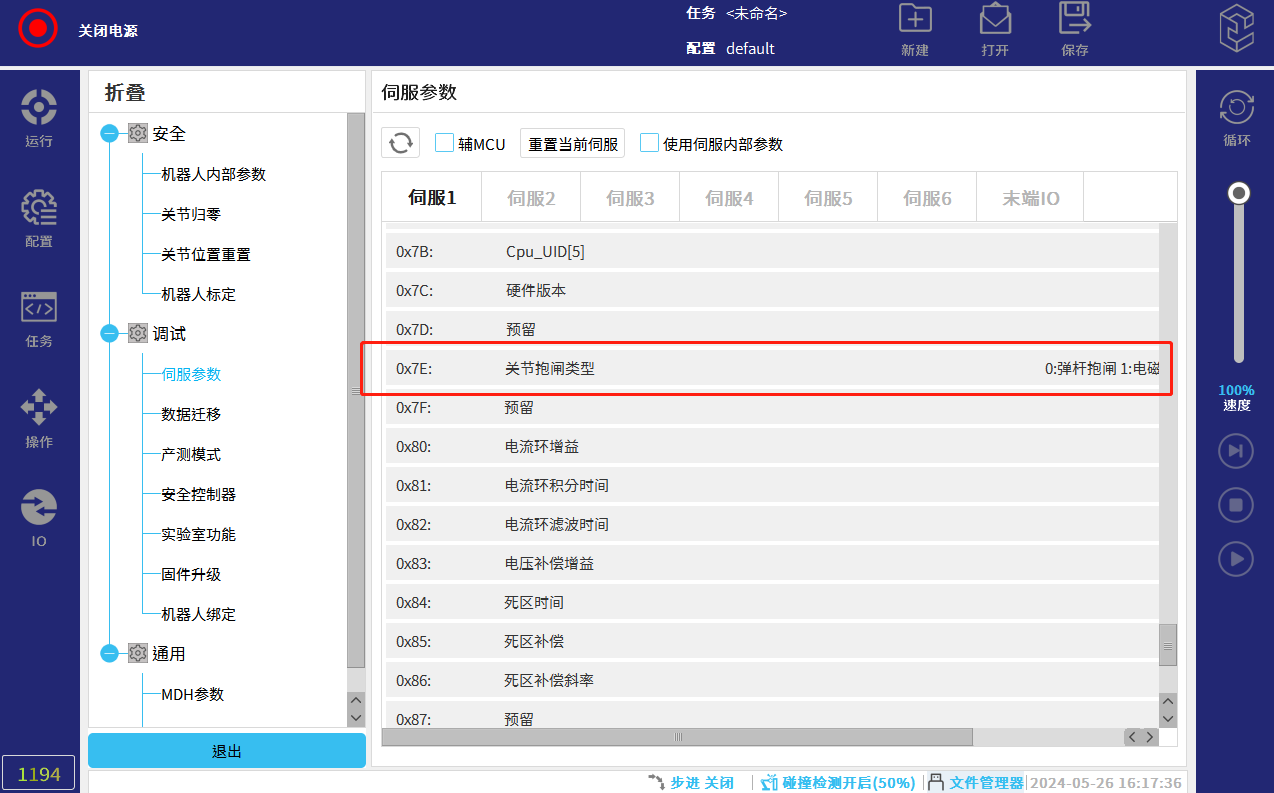
- 查看:在伺服參數界面下拉至0X7E位置,查看0X7E的值(0:彈桿抱閘,1:電磁抱閘)
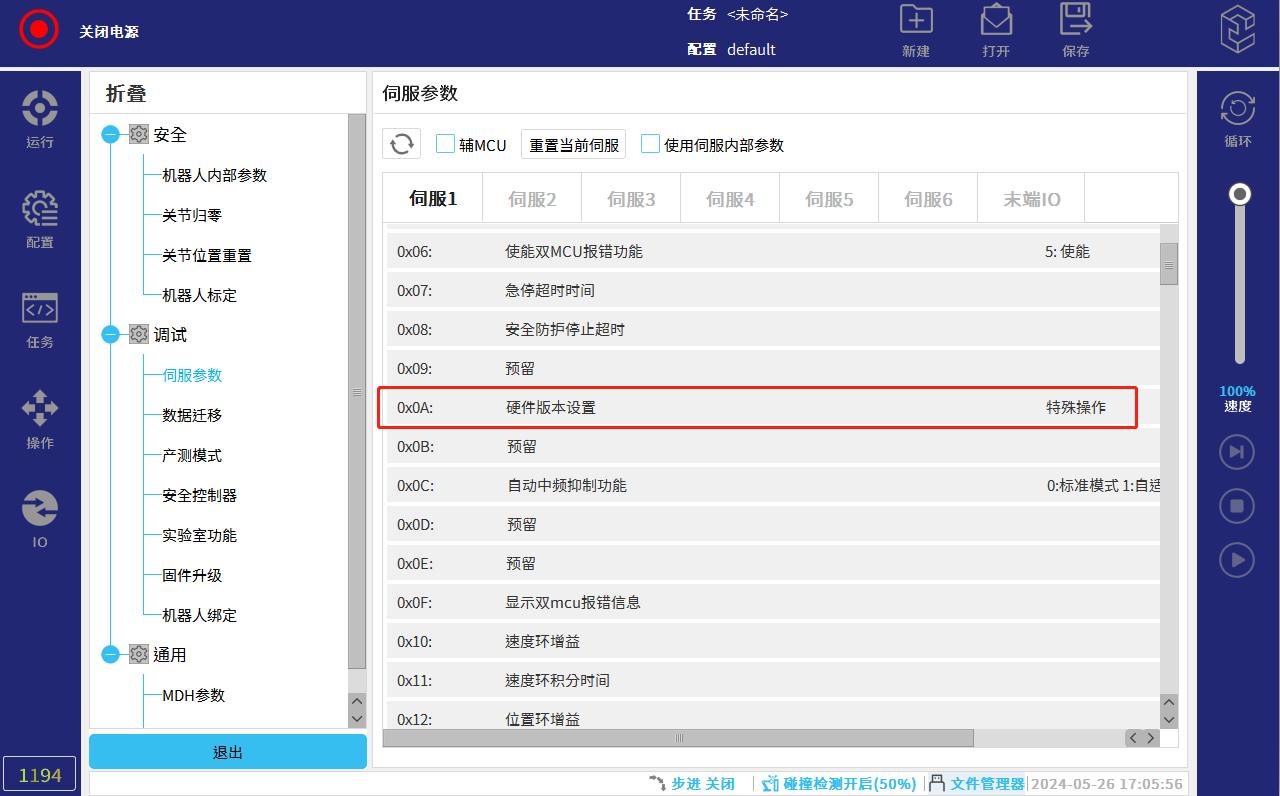
- 修改:參數界面回到上面,找到參數0x0A位置
- 先修改0x0A參數寫入30000,(這個為關鍵字,避免誤寫入)
- 接著0x0A參數寫入1,(抱閘類型為1-電磁抱閘)斷電再上電后0x7E顯示1
或者0x0A參數寫入2,(抱閘類型為0-探桿抱閘)斷電再上電后0x7E顯示0
2.2 松開抱閘的常用方法
注意:操作松開抱閘時建議將機器人軟件更新至2.10.1.14以上,此版本兼容各種抱閘類型操作
a. 電磁抱閘-機器人進入“反向驅動”
- 機器人進入下圖界面,點擊 “打開電源“

- 機器人顯示”待機“狀態后退出,進入運行頁面,切換狀態
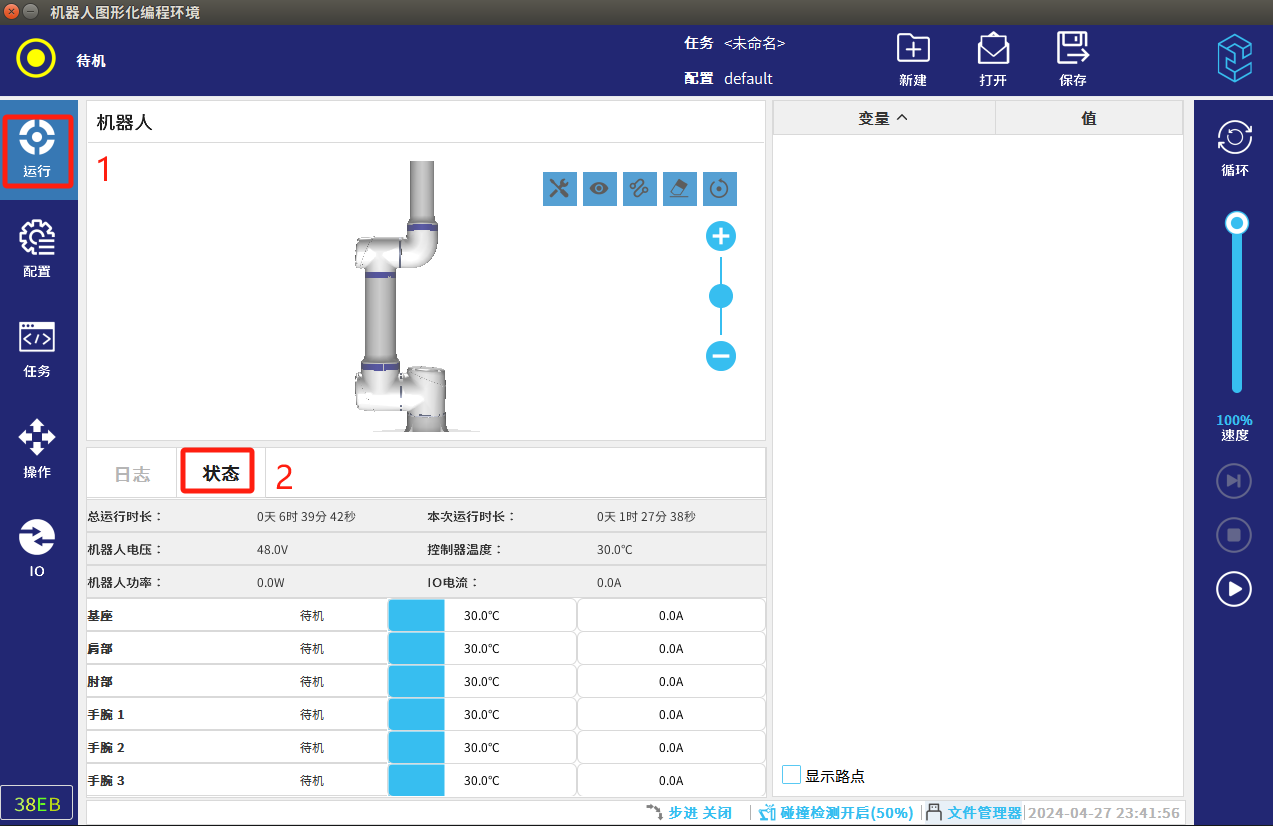
按住示教器反面的拖動使能開關,機器人即進入 “反向驅動”模式。點擊開啟對應軸的”反向驅動“,
此時關節在重力的作用下會正常下滑,機器人可以直接使用手進行拖動。
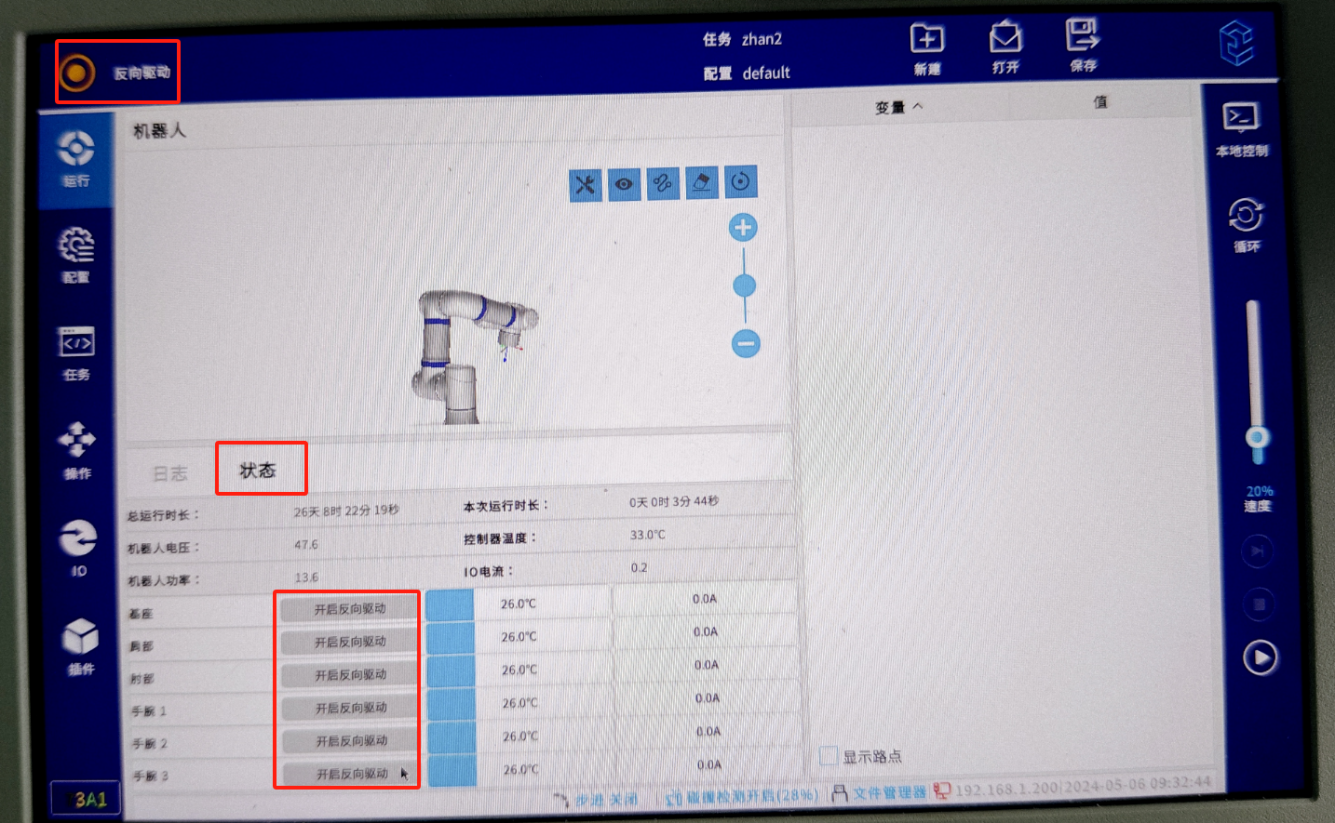
此時跟進現場情況單獨開啟一個軸或多個軸反向驅動,用手進行拖動將機器手移動到安全區域。
松開示教器反面的拖動使能開關,機器手電機抱閘,再松開機器人本體防止機器臂下滑導致二次傷害。
當機器人在安全區域內進入下圖界面,點擊 “釋放抱閘“。等待頁面左上角顯示“正常模式”,機器人可正常使用。

b. 插銷抱閘-機器人進入“反向驅動”
機器人進入下圖界面,點擊 “打開電源“
- 機器人顯示”待機“狀態后,按住示教器反面的拖動使能開關,機器人即進入 “反向驅動”模式。機器人可以直接使用手進行拖動,當受力達到一定程度后,伺服會自動松開抱閘,并被推動。
- 將機器人移動到安全區域內,然后點擊 “釋放抱閘“。等待頁面左上角顯示“正常模式”,機器人可正常使用。
3.常見問題解答
- 建議現場機器人的軟件版本更新至2.10以上,因為后續版本帶有減速機保護,能在發生碰撞時通過軟軸最大程度保護關節;
- 機器人觸發急停后,電磁式抱閘不會活動,插銷式有小范圍活動,因此也可以通過觸發機器人急停來判斷關節抱閘類型;
- 操作松開抱閘流程時,插銷式抱閘關節只要受到一定的力會自動松開抱閘,無關是否有選擇開啟反向驅動;
- 伺服關節損壞報警異常后無法通過以上松開抱閘方法操作,需手動松開,具體參考CS服務手冊操作指南
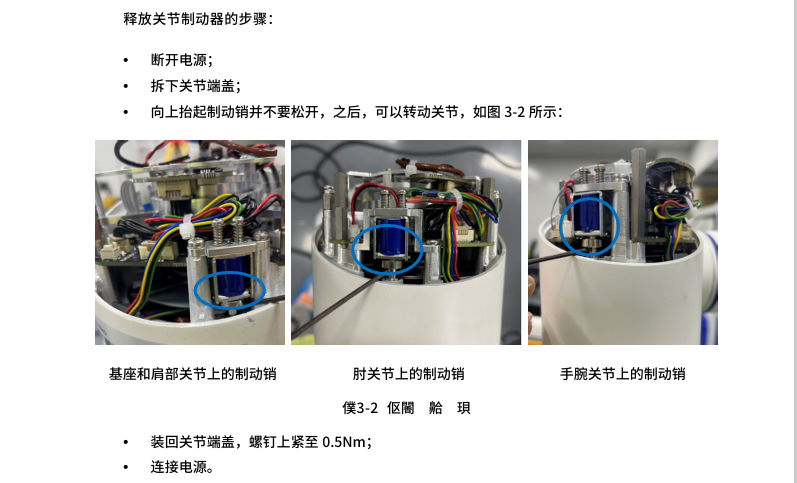
a. 插銷類型抱閘
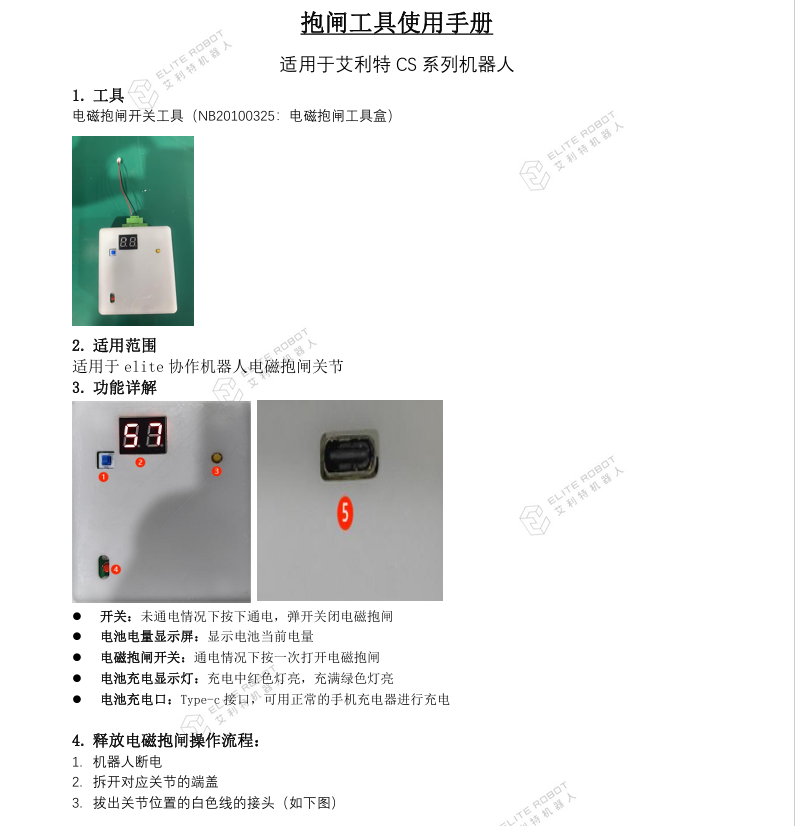
b. 電磁類型抱閘手動松開需要借助專業工具,可聯系艾利特售后人員并提供操作指南


4.示例
5.附錄
CS_服務手冊_CS66_V2.11.0.pdf
抱閘工具使用手冊.pdf
抱閘類型設置.pdf


























