CSH機器人基礎使用
2025-05-27
1. 簡介
本篇技術文檔對CS520H最基礎的開機使用,以及常見問題講解
2. 操作流程
1、開機從打包位進入垂直位置,直接點擊原點,就可以進入垂直姿態,不要直接按關節移動或者直線坐標系移動,由于520機器人有從動關節會出現機器人一直返回垂直姿態的情況

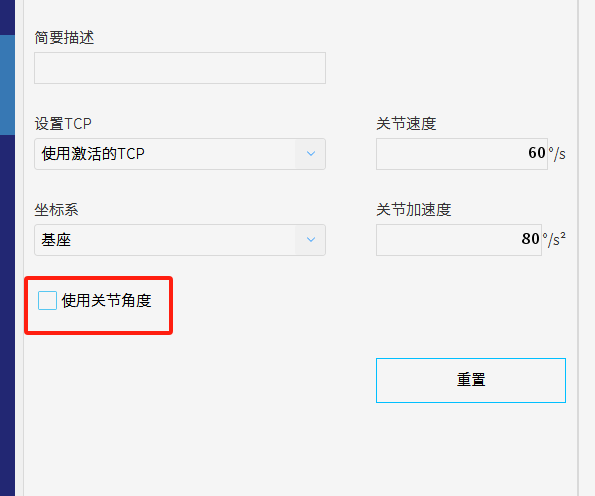
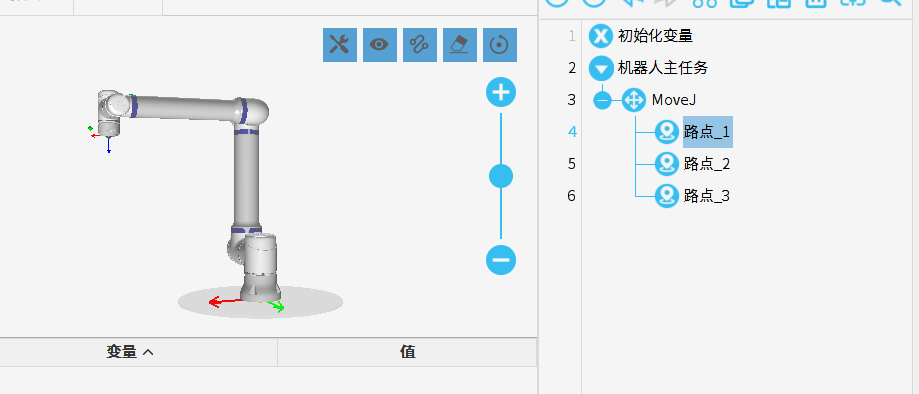
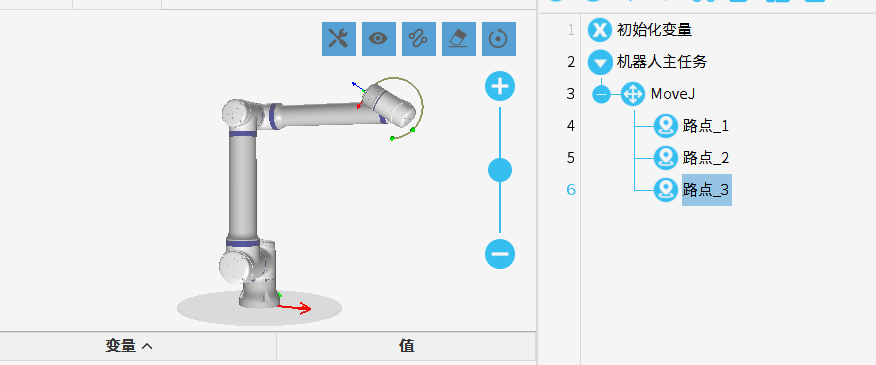
2、 在movej選擇關節角度下可以在4關節并不水平進行執行程序,如下圖
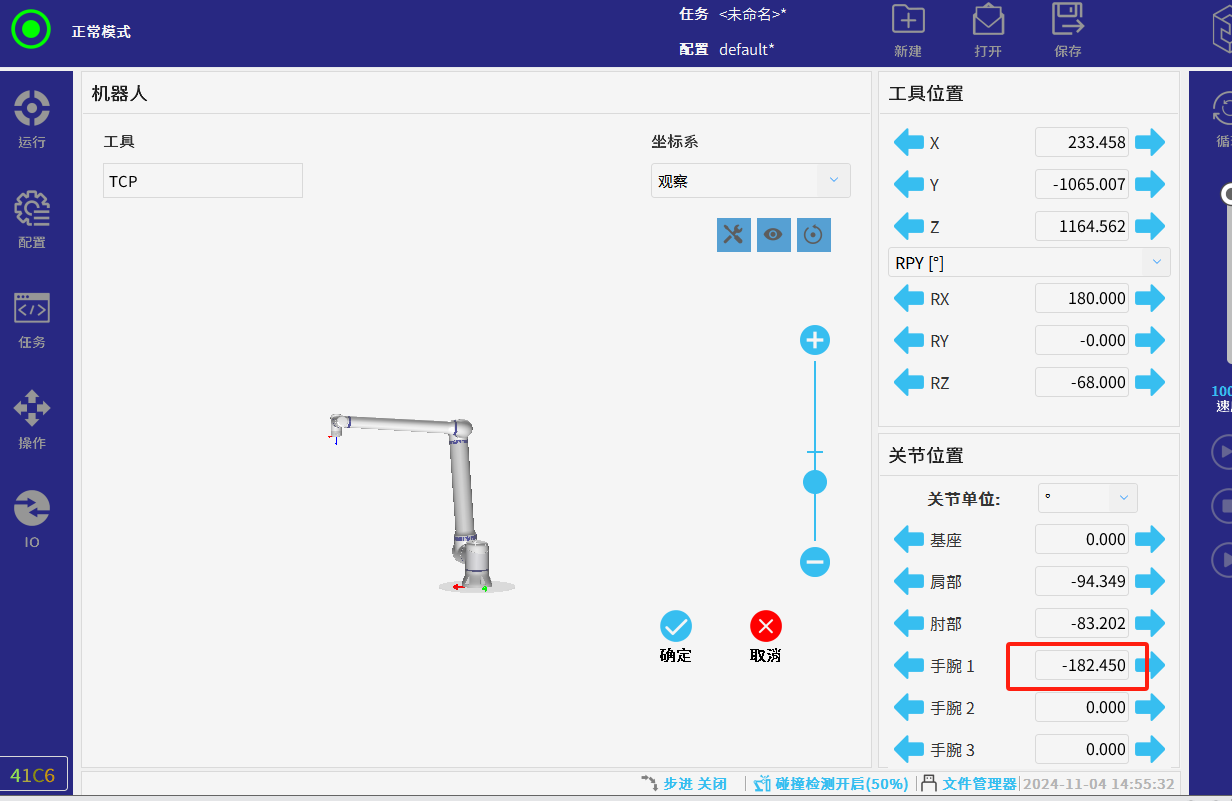
3、如需要單獨移動手腕1,操作步驟
(1)點擊關節位置手腕1參數處,進行修改

(2)進入機器人頁面后點擊關節位置手腕1,輸入對應想移動的角度后,點擊對號,長按自動移動就可以。
4、如出現手腕1,不平的情況可以嘗試修改關節零點位置,步驟如下
首先確認是否水平,可以使用水平尺,或者激光水平儀來測量,如下圖

垂直測量

水平測量
可以從上面兩種方法確認那個方向準確那個方向偏移,通過下面方法進行修正。
(1)連續點擊右上角空白處輸入密碼:elibot

(2)先點擊手腕1處,移動至想要的角度后(方法參考問題2),找到關節歸零,將手腕1選中后,點擊歸零關節。

達到下面結果進行完成效果,代表達到基本水平。


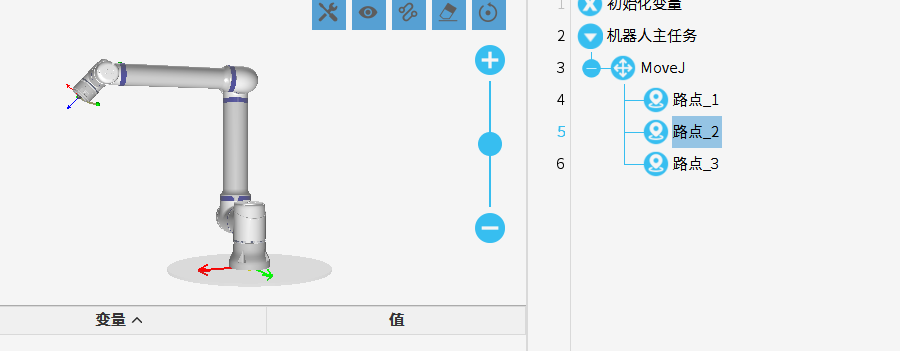
5、在2.13.1版本,H系列機器人做更新,可以進行朝上水平,如下圖