
















CS機器人TCP示教
1. 簡介
在一些應用場景機器人默認TCP可能滿足不了現場需求,這時就需要新建一個TCP來滿足現場需求
2. 操作流程
2.1示教位置
TCP 位置坐標可通過以下步驟自動計算:
第一步:在【配置】-【TCP】中,按照圖-1操作步驟進行操作。
- 添加一個新TCP。
- 點擊新建的TCP。
- 示教TCP位置,總共4個位置。

圖-1
第二步:機器人以4種不同的姿態示教4個位置(可以讓機器人分別X+,X-,Y+以及Z-4個方向通過4個不同的姿態示教4個點,該方向可以參考基座標系的方向)。在機器人工作空間中設置一個固定的尖點。機器人TCP以任意姿態進行戳點后,點擊“確定”。如圖-2,圖-3,圖-4,圖-5所示。

圖-2

圖-3

圖-4
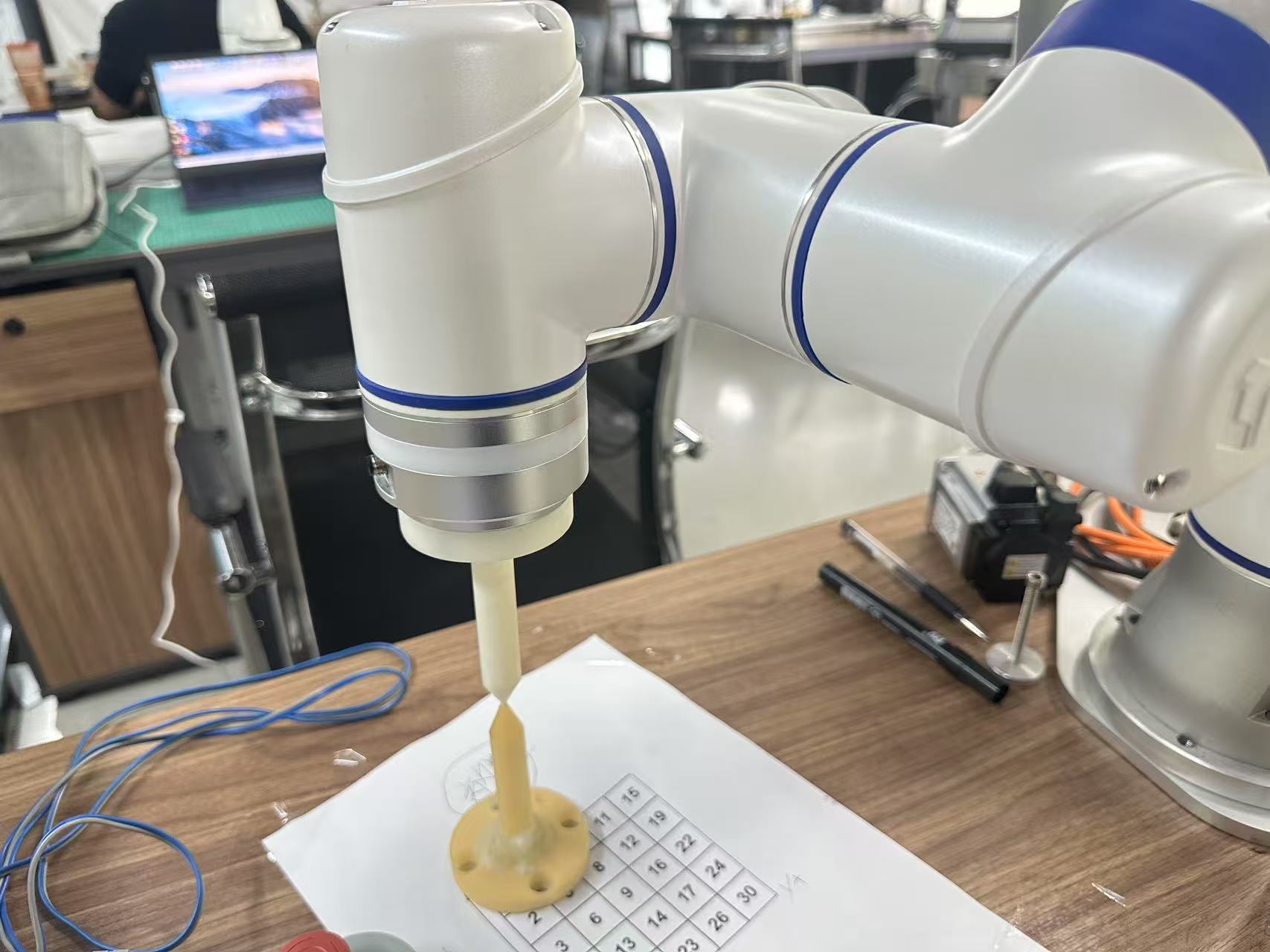
圖-5
第三步:4個點設置好后,如圖-6所示,點擊設定,新建的TCP就設置好了。如圖-7兩個紅框標記所示,新建的TCP_1與基座標系方向不同。

圖-6
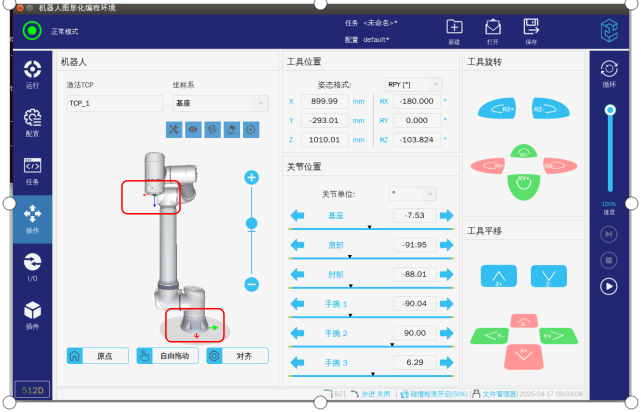
圖-7
2.2示教姿態
TCP 方向可通過以下步驟自動計算:
第一步:點擊“示教姿態”,如圖-8標記1。
第二步:從下拉列表中選擇一個坐標系,如圖-8標記2所示,圖中選擇的坐標系是基座標系。
第三步:點擊“設置點”,保證工具的方向和對應的 TCP 與所選的坐標系重合,如圖-8標記3所示。
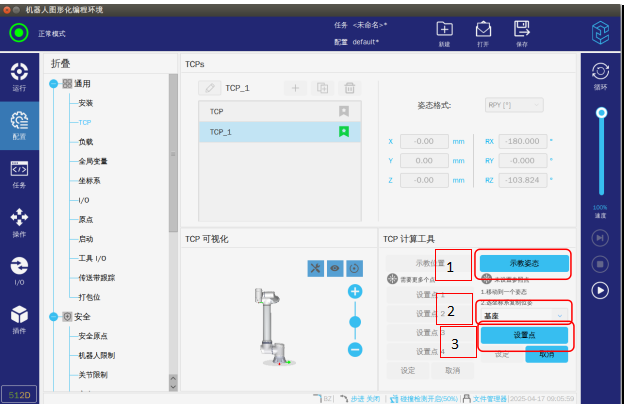
圖-8
第四步:驗證計算所得的 TCP 方向,點擊“設定”,將其引用于所選的 TCP 上。如圖-9所示。
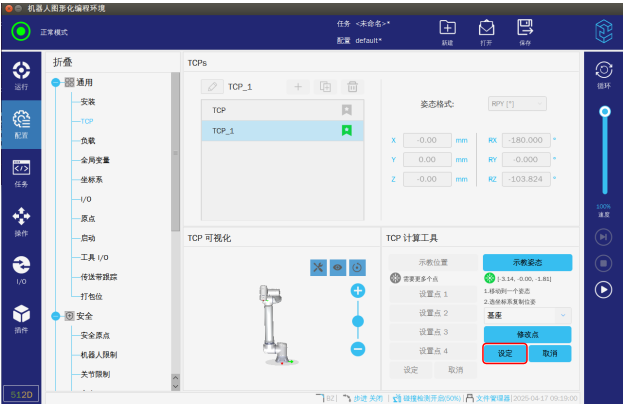
圖-9
第五步:設定完成之后TCP_1的方向就與基座標系方向一致了。如圖-10兩個紅框所示。

圖-10
2.3使用新建的TCP
第一步:使用新建的TCP,如圖-11所示,點擊紅框標記處,在彈窗后點擊確定,紅框標記處為綠色說明此時就是激活使用新建的TCP。

圖-11
第二步:驗證TCP是否示教標準,將機器人的尖點對準固定的尖點,如圖-2所示,然后執行第四步操作,將TCP切換成新建的TCP,旋轉RZ,觀察機器人尖點與固定的尖點的位置,如果兩個尖點始終對齊,說明TCP示教很標準;如果兩個尖點隨著旋轉角度變大,偏的越多,那就說明TCP示教的不標準,需要重新示教。
3. 常見問題解答
點 1 到點 4 四個點的姿態盡可能差別大,以確保計算結果正確。如果它們差別小,按鈕上方的狀態 LED 將變為紅色。
- 即使通常只要三個位置便足,確定 TCP,但仍然需要使用第四個位置來進一步驗證計算結果正確。


























