
















EC機(jī)器人MOV與MOVE兩種基礎(chǔ)運動指令區(qū)別
1.簡介
EC系列機(jī)器人運動指令應(yīng)用指南
在EC系列機(jī)器人編程中,MOV與MOVE作為兩種基礎(chǔ)運動指令形式,分別對應(yīng)不同的應(yīng)用場景:
一、指令特性對比
1. MOV指令
● 支持關(guān)節(jié)/線性/圓弧運動
● 參數(shù)設(shè)置簡潔(默認(rèn)融合半徑、自動加減速)
● 優(yōu)勢:代碼精簡直觀,適用于常規(guī)搬運、碼垛等基礎(chǔ)場景
● 建議:運動參數(shù)要求不苛刻時優(yōu)先采用,便于程序維護(hù)與客戶驗收
2. MOVE指令(3.4版本新增)
● 提供完整運動參數(shù)接口(速度/加速度/融合半徑可定制)
● 支持坐標(biāo)系綁定功能(工具/用戶坐標(biāo)系動態(tài)關(guān)聯(lián))
● 優(yōu)勢:實現(xiàn)高精度軌跡控制與程序快速遷移
● 典型場景:多TCP協(xié)作、精密裝配、跨設(shè)備程序移植
二、MOVE核心功能解析
1. 動態(tài)坐標(biāo)系綁定
● 工具坐標(biāo)系綁定:通過切換工具號實現(xiàn)不同TCP復(fù)現(xiàn)相同軌跡(適用場景:夾爪快速換型、多工具協(xié)同作業(yè))
● 用戶坐標(biāo)系綁定:通過坐標(biāo)系映射實現(xiàn)軌跡復(fù)用(適用場景:多工位碼垛、產(chǎn)線擴(kuò)展)
● 典型案例:EC63升級EC66時,保持原有軌跡邏輯,僅需更新坐標(biāo)系參數(shù)即可適配新臂展
2. 程序快速移植
● 跨機(jī)型兼容:同系列機(jī)器人間程序遷移時,確保目標(biāo)機(jī)型可達(dá)性前提下,通過坐標(biāo)系重定義快速投產(chǎn)
● 產(chǎn)線擴(kuò)展:新增加工設(shè)備時,通過坐標(biāo)系調(diào)整快速生成對應(yīng)作業(yè)程序
三、選型建議
● 優(yōu)先使用MOV:標(biāo)準(zhǔn)化作業(yè)、參數(shù)敏感度低的場景
● 必須使用MOVE:需要精密運動控制、多坐標(biāo)系管理或程序復(fù)用的場景
● 混合編程:常規(guī)動作用MOV保持簡潔,關(guān)鍵工藝段用MOVE精確控制
四、 運動方式
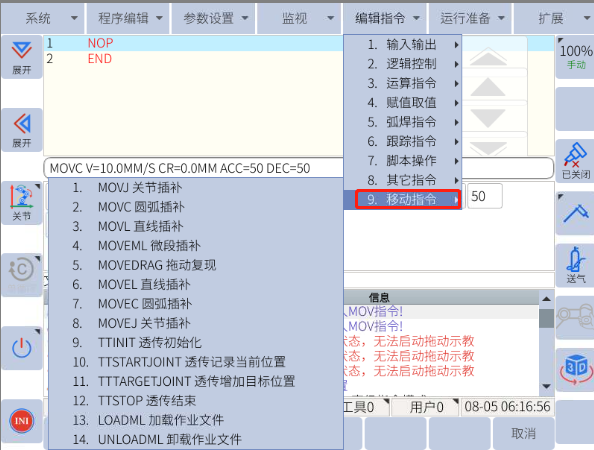
MOV:MOVJ、MOVL、MOVC
MOVE:MOVEJ、MOVEL、MOVEC
具體運動指令詳解請見JBI手冊
2.舉例
某機(jī)器人作業(yè)車間中追加了一個需要上下料的數(shù)控裝置,但這個裝置的距離較遠(yuǎn),因此該車間中的 EC63 機(jī)器人需要替換為臂展更長的 EC66。只要原本 EC63 中,關(guān)鍵部分的移動指令均為 MOVEL(或可以簡單地修改為 MOVEL),用戶就能省下示教原有程序的位置點所需要的大量時間,只需要調(diào)整綁定的用戶坐標(biāo)系參數(shù)并追加新數(shù)控裝置所需的程序即可
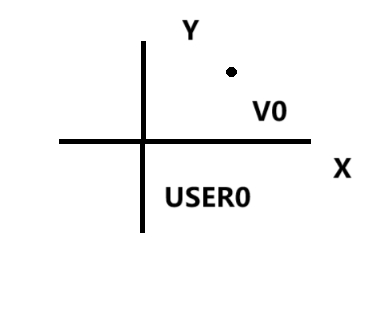
EC63 V0變量在用戶坐標(biāo)系USER0下的位置
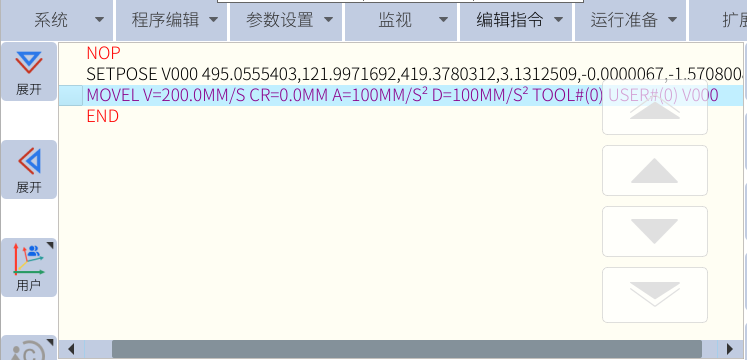
2.將EC63的備份恢復(fù)到EC66上,在EC66上不斷調(diào)整用戶坐標(biāo)USER0的數(shù)據(jù),就會得到V0在換機(jī)之前EC63下的同樣位置


























